Robot‐Mediated Communication
Media
Part of Robot‐Mediated Communication
- Title
- Robot‐Mediated Communication
- extracted text
-
Robot-Mediated Communication
SUSAN C. HERRING
Abstract
Since telepresence robots began entering the US commercial market over a decade
ago, telepresence robot-mediated communication (RMC) has become increasingly
prevalent and relevant. In this essay, I describe key technological properties of telepresence robots, summarize findings regarding communication and social interaction
through such robots, and propose a framework to guide future study of telepresence
robot-mediated discourse and language use. In concluding, I reimagine how telepresence robots could be reconceptualized and redesigned, for example, by moving
beyond human metaphors to incorporate “superhuman” attributes, and raise questions about the intended and unintended consequences of RMC.
WHAT IS ROBOT-MEDIATED COMMUNICATION AND WHY DOES IT
MATTER?
As robots become increasingly common human helpers and companions, the
study of human–robot interaction has surged in fields such as ergonomics,
healthcare, education, and human–computer interaction. This includes
interest in how people communicate with and through robots that are
teleoperated by humans, or what in this essay is referred to as robot-mediated
communication (RMC).
RMC is human–human communication in which at least one party is telepresent through voice, video, and motion in physical space via a remotely
controlled robot (Herring, 2015).1 Sometimes described as “videoconferencing on wheels” (Desai, Tsui, Yanco, Uhlik, 2011), RMC adds to real-time audio
and video the ability of a person to navigate and move about in a remote
physical location embodied as, or through the proxy of, a robot.2 Because of
the embodiment and enhanced control that they offer, particularly in terms of
1. Some categories of remotely operated robots, such as teleoperated service robots, robotic toys, and
androids, typically do not include video. These are not considered to be RMC platforms in this essay.
2. RMC is sometimes referred to as embodied video-mediated communication (eVMC; Tsui, Desai, & Yanco,
2012). Alternate names for telepresence robots that can be found in the literature include personal roving
presence (ProP; Paulos & Canny, 1998), mobile remote presence (MRP; e.g., Takayama & Go, 2012), and
mobile robotic telepresence (MRP; Kristoffersson, Coradeschi, & Loutfi, 2013).
Emerging Trends in the Social and Behavioral Sciences.
Robert Scott and Marlis Buchmann (General Editors) with Stephen Kosslyn (Consulting Editor).
© 2016 John Wiley & Sons, Inc. ISBN 978-1-118-90077-2.
1
2
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
mobility, telepresence robots can provide a richer sense of “being there” than
online videoconferencing technologies such as Skype. They enable a user not
only to communicate at a distance but to be virtually “in two places at once.”
The term RMC was coined by analogy with “computer-mediated communication” (CMC), which refers to human–human communication mediated by
networked computers—especially the Internet—and other digital media.
In that RMC mediates human–human communication and supports social
as well as task-related interaction, it resembles textual modes of CMC such
as email, text messaging, and (micro)blogging; graphical avatar-mediated
communication in virtual worlds; and online audio and video chat. Unlike
most CMC applications, however, RMC is asymmetrical, in that one person
is telepresent via a robot (henceforth, the pilot) while others are physically
present (henceforth, the local interlocutors).3
Not much research on RMC has been carried out by communication scholars to date.4 One reason is that although telepresence robots have existed
since the late 1990s (Paulos & Canny, 1998), high-definition video transmission and remote navigation use a great deal of wireless bandwidth,5 and it
has only become feasible to deploy such robots in real-world contexts since
fiber optic technologies expanded Internet bandwidth in the mid-2000s. The
first commercial telepresence robots were mobile robotic platforms designed
for use by physicians in medical settings. In the past few years, the number
of commercially available telepresence robots has grown,6 and research and
development are accelerating apace.
A consequence of this growth is that RMC is becoming increasingly
prevalent and socially relevant. More people are using telepresence robots
and producing RMC in an expanding range of contexts: business, educational, medical, and social. Telepresence robots are also used in security
and high-risk operations such as surveillance, mining, and search and
rescue, where it would be tedious or unsafe to send humans in; however, as
communication is secondary in such uses (if it is relevant at all), they are not
considered further here.
I research and use RMC in my professional academic life. The discussion
that follows reflects my experiences piloting a variety of telepresence robots
3. It is possible for all parties to be telepresent through multiple robots, but unless the robots need to
act in or on the physical space, it requires fewer resources and less effort for multiple remote interlocutors
to interact in virtual space.
4. An exception is the work of Leila Takayama (Lee & Takayama, 2011; Rae, Takayama, & Mutlu, 2013;
Takayama & Go, 2012), who uses the term RMC in several of her publications.
5. Bandwidth refers to the data throughput capacity of any communication channel
(http://www.encyclopedia.com/topic/Bandwidth.aspx, retrieved December 11, 2015).
6. Some of the more affordable ($2000–$3000) telepresence robots produced in the United States are
the Double, the TeleMe, and the Beam+. More expensive models (ranging from $7000 to $70,000) include
the VGo, the BeamPro, and the iRobot Ava. Recently, cheaper models produced overseas have entered the
market, including the Chinese PadBot (listed at $950) and the Russian Synergy Swan (listed at $999). Prices
are as of February 2016.
Robot-Mediated Communication
3
(in addition to several that I own) as well as the literature on telepresence
robots and RMC. After briefly describing key technological properties
of telepresence robots, I summarize what research has found regarding
communication and social interaction through such robots, or what I
call RMC broadly construed. Data-driven analysis of the actual, situated,
and embodied communicative practices of interlocutors in telepresence
robot-mediated conversations, or RMC narrowly construed, is largely
lacking so far. Thus, I propose a framework with questions and methods to
guide future study of telepresence robot-mediated discourse and language
use. In the final section, I consider ways in which telepresence robots could
be reconceptualized and redesigned, and raise questions about the intended
and unintended consequences of RMC.
TECHNOLOGICAL PROPERTIES OF TELEPRESENCE ROBOTS
When people think of robots, they tend to think first of autonomous robots
such as R2-D2 and C-3PO in the Star Wars movies. Autonomous robots
depend on preprogrammed commands and artificial intelligence, and they
are limited in their ability to communicate compared to human beings. In
contrast, telepresence robotics is a form of robotic remote control by a human
operator that is used to facilitate geographically distributed communication.
Telepresence robot-mediated interaction is intended to simulate face-to-face
(f2f) communication, and its success (or failure) is typically evaluated in
comparison to f2f interaction. That said, the line between telepresence and
autonomous robots often blurs, as when autonomous features, such as
obstacle avoidance, are incorporated into human-piloted robots.
There are “child-sized” telepresence robots (such as the Telenoid, developed in Japan, which is intended to be held in the local user’s arms) and
smaller table-top devices (such as the Kubi and the MeBot). The focus of
this essay is on “adult-sized” telepresence robots, which are the most widely
deployed and the most studied to date. The following descriptions pertain
especially to the adult-sized telepresence robots that are currently commercially available in the United States (referred to for convenience simply as
“telepresence robots” or “robots” henceforth), as exemplified by the VGo,
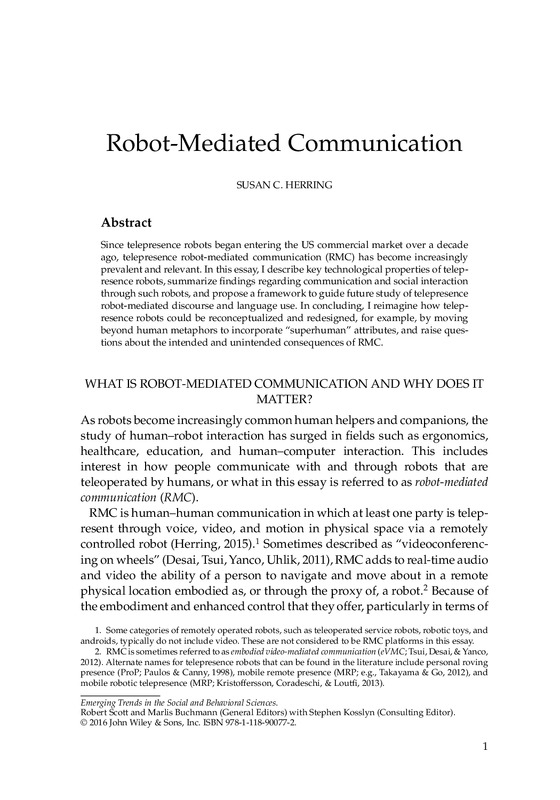
the QB, the BeamPro, the Beam+, the Double, and the iRobot Ava (Figure 1).
These devices are shaped and constrained by a specific set of technological
properties:
Embodiment. A telepresence robot can be designed to look like a human
being, but most versions in use today are not. The “head” of the typical
telepresence robot is (or includes) a video monitor; some robots have
4
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
iRobot Ava
Double
Beam+
QB
VGo
BeamPro
Figure 1 Some commercial telepresence robots.
an iPad or Android tablet as their video monitor. The head and shoulders of the pilot are typically visible in the video screen. The robot’s
“body,” in contrast, is often little more than a vertical column mounted
on a wheeled base, as shown in Figure 1. Robotic arms, because they are
difficult to create and expensive to produce, usually are not included,
although some designs include pointing devices.7
Size. Especially if the intended use is in a work environment, the general
sense among designers is that the robot should be large enough to be
taken seriously, but at the same time, not so large as to be perceived as
intimidating or dangerous. That said, current commercial models range
widely from 11 to 186 pounds, with heights from 2.8 to 6 feet, corresponding roughly to the height of a seated or a (short) standing adult
human. Some robots allow the pilot to adjust the robot’s height while
in use.
Movement. The main movement of telepresence robots is rolling about
in physical space. Similar to audio- and video-conferencing, most
telepresence robots operate through a WiFi (wireless) network. The
pilot remotely controls the movement of the robot through a computer
interface that features various navigation controls and indicators; some
robots can also be controlled via touch screen or a joystick. Today’s
robots typically have speeds equivalent to a (slow) walking pace.
Some can automatically detect obstacles and edges (such as stairs) and
prevent the robot from rolling into them. Some, such as the iRobot
Ava, are equipped with automated point-to-point navigation. These
automated features let the pilot focus less on navigation and more on
communication.
7. The early PRoP robot, for example, included a two-degrees-of-freedom pointer “so that remote
users [could] point as well as make simple motion[s]” (Paulos & Canny, 1998).
Robot-Mediated Communication
5
Audio and Video. The pilot “sees” through the robot’s cameras and “hears”
through its microphones, like in video conferencing. According to
Neustaedter, Venolia, Procyk, and Hawkins (2016), the head camera on
the BeamPro, a high-end telepresence robot, provides the equivalent of
20/200 vision. Peripheral vision is also typically limited, and in robots
that use one head camera, depth perception is lacking. To partially
compensate for these limitations, some head cameras include a zoom
feature, and some pan and tilt. Some robots are also equipped with a
camera that provides views down to the base to aid in navigation. As
in videoconferencing, the pilot sees a small picture-in-picture image of
him- or herself in the control interface; however, auditory feedback is
often lacking.
Message Transmission. Telepresence robots support synchronous,
ephemeral, two-way, voice-based communication, similar to audio–
video conferencing and f2f communication. Some also let the pilot
leave text on the robot’s video screen, and my VGo converts text typed
by the pilot into speech by the robot, which can be useful as a backup
when audio transmission problems occur.
These properties have consequences for RMC, both broadly and narrowly
construed.
COMMUNICATION AND SOCIAL INTERACTION THROUGH
TELEPRESENCE ROBOTS
The primary aim of telepresence robots is to foster social interaction between
individuals, or RMC broadly construed. That aim is often thwarted in practice, however, by network problems that result in unsynchronized audio and
video streams or loss of network connectivity. The robot may bump into
things or stall in the middle of a hallway, and audio or video may break up or
be temporarily lost. Audio is more important than video in conveying a sense
of presence; it is also essential for verbal interaction. I have found through
experience that poor audio input quality in combination with limited vision
can make locating and identifying the source of voices in the local environment challenging. Laggy audio can also compromise fundamental aspects
of turn-taking and interruptions (O’Conaill, Whittaker, & Wilbur, 1993). As
Desai et al. (2011) incisively conclude, “audio issues [can] make it difficult to
have any conversation, let alone a natural conversation.”
One must look beyond the present technical limitations of telepresence
robots, however, to appreciate their communicative potential. When the
technology works like it is supposed to, RMC has been found to be more
casual and sociable than video conferencing. Telepresence robots that were
6
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
used in technology workplaces for a year or more were found to enhance
“impromptu work meetings” (especially to ask questions, exchange ideas,
and get answers), “being available,” “planned social meetings,” “planned
work meetings,” “seeking people,” and “greeting/socializing” (Lee &
Takayama, 2011). Tsui et al. (2012) found that the novelty effect of using a
telepresence robot wears off quickly, within 15 minutes. Sometimes, the
robot becomes effectively “invisible-in-use” (Takayama & Go, 2012), such
that the remote user and the local interlocutor(s) experience the subjective
illusion of talking f2f.8 Some pilots identify with the robots as themselves,
to the point that they feel that their personal space is violated when a
local user approaches too close or touches their robot. These findings lend
support to Lee and Takayama (2011)’s claim that RMC blurs “boundaries …
between person and machine, physical and virtual, and being here vs. being
elsewhere.”
At the same time, RMC can be socially awkward, and new norms of interaction must be negotiated as pilots and local interlocutors mutually adjust to
the technological properties of telepresence robots. For example, local interlocutors are often unsure how to deal with a stalled robot, and may assume
that the interaction has ended and walk away, rather than waiting a few
moments for the pilot to reestablish a network connection or moving the
robot into range of a WiFi hot spot. The robot may impede normal human
traffic flow in a building or block others’ view in meetings or at conferences
without the pilot being aware of it, owing to the robot’s limited range of
vision. The pilot may misgauge social distance due to a lack of depth perception and position the robot too close or too far away from an interlocutor;
may talk too loudly, owing to a lack of audio feedback; or may linger too long
after a conversation, owing to missed social cues (Lee & Takayama, 2011).
Unless they understand the robot’s technological limitations, local interlocutors may interpret these behaviors as socially inappropriate or rude on the
part of the pilot.
Locals may also ascribe social meaning to the robot’s size. Robot height
influenced local interlocutors’ perceptions of leadership effectiveness in a
study by Rae, Takayama, and Mutlu (2013), with robots that were taller
than locals sitting down perceived as more leader-like than robots that were
shorter than the seated locals.9 Kristofferson et al. (2013) found that “people
of different [height] preferred robots of different height and adjusted their
distance to them accordingly.” This may have stemmed from a desire to
8. Paradoxically, realistically humanoid (e.g., android-style) robots can distract and detract from the
interaction experience (Mutlu, Yamaoka, Kanda, Ishiguro, Hagita, 2009), possibly because they only
project the pilot’s voice and movements, and not his or her face. Video is useful in “provid[ing] subtle
information about the motions, actions, and changes at the remote location” (Paulos & Canny, 1998).
9. Girth also matters, it seems. Leila Takayama (personal communication) reports that the thinner
robots have less presence than the wider, more substantial ones.
Robot-Mediated Communication
7
look the pilot in the eye as much as possible, or to adjust for the perceived
or desired power distance between the pilot and the local interlocutors.
The embodied nature of the robot is also relevant to issues of identifiability
and anonymity. More than one person can pilot a robot (albeit not at the same
time), and one person can pilot multiple robots. When more than one person
uses the same robot or the same kind of robot, the anonymous appearance
of the robot can make the pilot difficult to identify, especially from behind.
Locals sometimes dress or decorate the robot, for example, with a hat, t-shirt,
or scarf, to associate it with particular pilots (Neustaedter et al., 2016). The
robot’s anonymous appearance may be advantageous, however, in circumstances where the remote participants wish to avoid drawing attention to
themselves.
Ambiguity may also arise about a moving robot’s intent, owing to gaze misalignment and a lack of gestural cues—does the pilot want to chat, or is he
or she just trying to pass by? (Neustaedter et al., 2016). As in video conferencing, the pilots’ cameras are often facing in a different direction than their
video image appears to be looking (Lee & Takayama, 2011), and thus the subtle cues that are normally exchanged via gaze f2f are not available in RMC.
The pilot’s gestures are also less visible. Some researchers have suggested
that because facial expressions and nonverbal gestures are not as salient,
telepresence-mediated interaction feels less “real” than f2f communication
(Mantei et al., 1991). My own experience piloting telepresence robots is that
I am “present” at the remote location but not as present as if I were in my
physical body. This too can have advantages: I have observed that locals’
behavior tends to be more unguarded around my robot than it would be if
I were physically present, and it is easier to observe others in social interactions when less focus is on me, as tends to occur once the novelty of the robot
avatar wears off. Indeed, some pilots move the robot from side to side just to
remind locals that they are there.10
Although lacking in the ability to produce human-like social cues, telepresence robots have other ways of signaling intention, such as flashing lights or
gesturing with a laser pointer, and these can develop conventionalized meanings. The robot’s mobility can be a form of body language for starting and
stopping conversations; for example, slight movements may indicate the end
of a conversation (Neustaedter et al., 2016). Simply turning the robot’s head
or body to face the intended addressee is often an effective way to engage.
In multiparty interactions, one study found that turning to look at a current
speaker resulted in more and longer conversational turns. At the same time,
“swiveling toward one [local] participant often meant that another [local]
participant was left looking at the edge of the display screen” (Sirkin et al.,
10. Leila Takayama, personal communication.
8
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
2011), and the time required to rotate the display introduced delay into the
conversation, disturbing its natural flow.
Related to movement, the robot’s lack of arms means that it requires
help to manipulate its surroundings (e.g., opening doors, pressing elevator
buttons, moving objects), and this must be negotiated between pilot and
locals. Because of this, some pilots report feeling like they are disabled
(Lee & Takayama, 2011).11 Locals may share this perception too. Takayama
and Go (2012) found that people have different metaphors for telepresence
robots, and their social expectations depend on those metaphors. Locals who
view the robot as a machine, purely a mediating technology, tend to have
lower social expectations of it; they are more likely to help the robot, while
feeling less constrained by f2f norms of politeness. For instance, they might
not consider it rude to put their feet up on the robot’s base while conversing
with it, or to mute the telepresence robot from the local side (Takayama
& Go, 2012). In contrast, people who think of the robot as a person and a
social actor tend to consider such behaviors impolite. Many subjects who
thought of the robot as a person in Takayama and Go’s study thought of it as
a disabled person. The implications of the disability metaphor for politeness
and helpful behavior have not been studied yet, however.
LANGUAGE AND DISCOURSE IN ROBOT-MEDIATED
COMMUNICATION
“The most important component of communicating through a telepresence
robot is the conversation itself” (Tsui et al., 2012), or RMC narrowly construed. Yet although language and discourse in CMC has been described
extensively,12 almost no study has been made of the linguistic choices that
interlocutors make in RMC—their patterns, their variations, their intended
meanings, or their pragmatic effects. Moreover, no research has been based
on close analysis of a corpus of actual RMC. Is language use more or less formal in RMC than in f2f? How do others refer to the robot—as “you,” “s/he,”
or “it”—and what factors condition variation in reference? How does the
limited mobility and range of visibility of pilots affect their ability to attract
attention, gain and hold the conversational floor, and time turn-taking appropriately? What is the social and hierarchical status of the pilots: Are they
taken less seriously when they are in positions of authority? Do they receive
politeness and deference the same as if they were physically present, and to
what extent does this vary by gender and culture—theirs and that of their
local interlocutors?
11. In contrast, some physically disabled users, who otherwise might not be able to move about a
remote site, experience robotic embodiment as empowering (Neustaedter et al., 2016).
12. For a recent overview, see Herring and Androutsopoulos (2015).
Robot-Mediated Communication
9
As a framework that could be used to guide exploration of these and related
questions in the pilot’s and the local interlocutors’ discourse, I identify five
categories of language use in RMC that could fruitfully be researched, organized from smallest to largest linguistic units and from least to most context
dependent, with sample phenomena of potential interest listed for each category. Each category could be addressed by existing linguistic methods of
analysis, modified to take into account the mediating properties of telepresence robots.13 (Italics indicate phenomena that have been touched upon in
the RMC literature.)
Structure. RMC- and context-specific conventions of language use; word
frequencies; formality; organization of speaking turns, exchanges, and
conversations; disfluencies; intonation and volume; gesture.
Meaning: Word Choice/Use. Discourse topics (What is the talk about?); interactive personal pronouns (e.g., “I”, “we”, “you”) and forms of reference
(“s/he”, “it”, “the robot”, etc.); vocabulary diversity and size; metaphor
use.
Meaning: Pragmatics. Speech acts (What are the speakers doing through
language?); determining intention; observations and violations of conversational maxims; politeness; topic initiation, development, and termination; deixis; presupposition, implicature, and so on.
Interaction Management. Attention-getting; greeting; leave-taking (termination of interaction); preferred and dispreferred responses; turn-taking;
back-channeling; pausing/silence/inactivity [verbal vs multimodal
(cf. Licoppe & Morel, 2012)]; conversational repair; gaze; orientation to
current speaker.
Social Phenomena. Stylistic differences according to gender, age, socioeconomic status, culture, role, experience with robots, and so on;
self-presentation and self-revelation; lying and deception; playful
behavior; giving and receiving support; accommodation; conflict and
conflict management; negotiation (e.g., around use of shared space);
power/leadership; influence; deference, and so on.
These categories are not discrete; a single phenomenon could be addressed
on more than one linguistic level. Rather, the categories are intended as different lenses through which RMC can be viewed. Each lens brings into view
different questions, methods, and theoretical perspectives.
Naturally occurring robot-mediated interactions constitute the most
authentic data for studying language use in RMC. There are privacy issues
13. The organization of these categories follows that for computer-mediated discourse analysis, a
paradigm developed for textual CMC (Herring, 2004).
10
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
associated with collecting such data, though, as it could be perceived as
mobile surveillance. Moreover, unlike asynchronous web communication,
RMC is not self-archiving; the researcher needs to devise methods of recording, transcription, and presentation for information not normally found in
CMC, such as movement and gaze direction. Nonetheless, close analysis of
language and discourse in RMC is an important and fruitful direction to
pursue in future research.
Experimental methods are also valuable—for example, for comparing
RMC, both narrowly and broadly construed, with other modes of communication. Such comparisons would spotlight different effects of robot
mediation: RMC compared with f2f communication would shed light
on the effects of the robot proxy; RMC versus video-mediated communication would illuminate the effects of ambulation; and RMC versus
avatar-mediated communication would highlight the differential effects of
physical and virtual environments, for instance.
Finally, surveys and interviews are useful for querying participants
directly about RMC. In addition to their linguistic and social perceptions,
local participants could be asked to what extent they felt that the pilot was
present in a given interaction, toward the larger goal of understanding what
circumstances contribute to creating the effect of “invisible-in-use” robotic
telepresence.
THE FUTURE OF TELEPRESENCE ROBOTICS AND RMC
Referring to autonomous robots, Nourbakhsh (2013, p. xv) recently wrote,
“[T]he ambitions of robotics are no longer limited to imitating [human
beings]. … We have invented a new species, part material and part digital,
that will eventually have superhuman qualities.” Similarly, telepresence
robots need not be limited by “human” metaphors. Present iterations
already have “superhuman” abilities, compared with what is possible in
f2f communication: They enable a person to be in two (or more) places
simultaneously, and they provide mobility across great distances to the
mobility impaired. The first telepresence robot, Eric Paulos’s ProP, could
also float through the air.
In theory, nearly any autonomous robot in use or development today could
become a telepresence device with the addition of two-way audio–video
communication. Communicating remotely with other people through
“giant, military robo-dogs”14 (Nourbakhsh, 2013) is neither necessary nor
desirable, but the human-pilotable flying robots known as drones could
make useful communication devices, in addition to being able to navigate
14. A reference to Boston Dynamics’ “Big Dog” military robot. See: http://www.bostondynamics.
com/robot_bigdog.html.
Robot-Mediated Communication
11
outdoors over uneven terrain. Other nonhuman robotic designs suggest
interesting possibilities for remote human interactions, as well, ranging from
telepresence robots in the form of normal-sized dogs (to keep company with
and comfort the ill and elderly) to robots with multiple, highly specialized
arms (for remote surgical procedures).
To enhance robot-enabled multimodal, multicontinental telepresence,
future robots could include built-in navigation and map-creation technology; automated speech translation across languages; augmented reality
technology that overlays the video with information about current or
anticipated interlocutors drawn from an Internet database; and sensors to
collect information about the remote environment, ranging from proxemic
information about when a person is trying to squeeze by to information
about interlocutors’ emotional states. The robots could change appearance
according to who is piloting them at the moment. For example, they could
include screens upon which holographic images are projected, so that a
moving, speaking, three-dimensional representation of the pilot’s physical
self is visible in the remote environment. Making the remote pilot’s identity
readily visible is one way to encourage more human–human interactions,
and making the remote pilot visible from all angles would make bystanders
more likely to enter into conversations (Takayama & Go, 2012). Pilots,
at their end, could wear virtual reality gear to simulate an experience of
immersion in the remote environment, and their body motions could be
tracked and mirrored in the remote robot. The robots themselves could be
flexible, pliable, and gentle to the touch.
Meanwhile, the telepresence literature is filled with recommendations
for ways to improve the current paradigm of “videoconferencing on
wheels.” More and better cameras would provide the pilots with better
situation awareness (Desai et al., 2011). Convex video displays could afford
a wider range of directing a pilot’s gaze while not “turning her back” on
some participants (Sirkin et al., 2011). Some current video conferencing
systems use audio location to work out who is speaking and then focus
cameras on that speaker (Yoshimi & Pingali, 2002); this could also be
done for robots. A screen with a camera embedded in the middle would
aid interlocutors in establishing eye contact (Kristoffersson et al., 2013).
Features to provide remote pilots with more feedback about how they
are presenting themselves—for example, providing mechanisms to help
monitor their volume levels, monitor their appearance, and communicate
nonverbally—could improve the user experience for both remote pilots and
locals (Lee & Takayama, 2011).
The robot’s base could have treads that would allow it to roll over curbs
and climb stairs (Paulos & Canny, 1998). Lasers could assist navigation when
passing through doorways and while driving down hallways; for example,
12
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
if the robot drives at an angle toward a wall, the robot could autonomously
correct its direction (Desai et al., 2011). Autonomous navigation is desirable in
general for safety reasons, for ease of use, and to reduce social awkwardness
associated with bumping into walls and other objects. In studies by Desai
et al. (2011), a “follow person” behavior and a “go to destination” mode were
rated as potentially quite useful. However, automation raises issues of ethics
and legal liability. As Takayama and Go (2012) ask, “If a semi-autonomously
navigating MRP (mobile remote presence) system bumps into a person or
damages valuable furniture, who is to blame?” Adjustable autonomy would
allow the pilot to select from a range of autonomous behaviors or levels
according to circumstances.
At present, the main bottlenecks to the widespread adoption of telepresence robots are Internet/WiFi reliability and the cost of acquiring units. Costs
are already dropping as new models appear on the market.15 As for lost WiFi
connection due to limitations in range of WiFi and “network shadow” caused
by metal objects such as elevators and lockers, Kristoffersson et al. (2013)
propose automatically “reversing the [robot’s] motion in slow speed until
sufficient access to the WiFi is recovered.” They also suggest adding a light
or backup beep “to indicate the robot’s intention.”
Some suggestions from the research literature have already been implemented in robotic prototypes. Articulating arms, for instance, have been
implemented on the MeBot V4 tabletop telepresence robot. The robot has
two arms with three degrees of freedom: shoulder rotation, shoulder extension, and elbow extension; the arm movements are directly controlled by the
pilot, who adjusts the joints on a passive model of the robot (Kristoffersson
et al., 2013). The researchers who designed the MeBot V4 found that local
users rated it as more engaging and likable than a similar static robot design.
The success of this prototype raises the possibility that a similar approach
could be adapted to adult-sized robots, although body tracking would be
more direct. However they are implemented, remotely controllable arms
would greatly increase the ability of telepresence robots to interact with
and in remote environments, rendering them both more sociable (e.g., able
to gesture, shake hands, and hug) and less “disabled” and dependent on
assistance from local interlocutors (e.g., to press elevator buttons and open
doors).
As Nourbakhsh rightly observes, robot proxies expand our physical space
and reach. At present, the implications of that expansion have only begun
to be felt, implications that extend beyond the fields of technology design,
human–robot interaction, and CMC into the social and behavioral sciences,
and from there into any number of applied domains. Rae, Venolia, Tang,
15. See note 6.
Robot-Mediated Communication
13
and Molnar (2015) caution that designers and researchers should keep in
mind what future they are trying to invent with telepresence. Because the
focus of this essay is on communication, I have not considered other ways in
which telepresence extends human experience that do not primarily involve
human–human communication, including actions that would be impossible in one’s physical body such as extreme mountain climbing, or perceiving/feeling through the eyes/body of another person wearing a telerobotic
skin. Such applications of telerobotics raise fascinating questions in their own
right.
As regards RMC, researchers need to consider the nature of the communication that telepresence robots are used to support, between what kinds
of communicators, for what purposes, and in what contexts? Beyond these
primary, or intended uses, what secondary or unintended consequences
might follow from RMC? The popular media are filled with hype and
warnings about our future coexistence with robots. Telepresence robots are
human proxies, not autonomous machines; nonetheless, their impact if they
come into widespread use could be as great as that of autonomous robots.
This is all the more true as the line between autonomous and teleoperated
robots continues to blur.
ACKNOWLEDGMENTS
Many thanks to Jeannie Fox Tree, Rob Martin, Leila Takayama, and Steve
Whittaker for their valuable input on this essay.
REFERENCES
Desai, M., Tsui, K. M., Yanco, H. A., & Uhlik, C. (2011). Essential features of telepresence robots. In Proceedings of the IEEE international conference on technologies for
practical robot applications (TePRA ’11), (pp. 15–20). Los Alamitos, CA: IEEE.
Herring, S. C. (2004). Computer-mediated discourse analysis: An approach to
researching online behavior. In S. A. Barab, R. Kling & J. H. Gray (Eds.), Designing for virtual communities in the service of learning (pp. 338–376). New York, NY:
Cambridge University Press.
Herring, S. C. (2015). New frontiers in interactive multimodal communication. In A.
Georgapoulou & T. Spilloti (Eds.), The Routledge handbook of language and digital
communication (pp. 398–402). London, England: Routledge.
Herring, S. C., & Androutsopoulos, J. (2015). Computer-mediated discourse 2.0. In
D. Tannen, H. E. Hamilton & D. Schiffrin (Eds.), The handbook of discourse analysis
(Vol. ,2nd ed., pp. 127–151). Chichester, England: John Wiley & Sons.
Kristoffersson, A., Coradeschi, S., & Loutfi, A. (2013). A review of mobile robotic
telepresence. Advances in Human-Computer Interaction, 2013, article 3.
14
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
Lee, M. K., & Takayama, L. (2011). “now, i have a body”: Uses and social norms for
mobile remote presence in the workplace. In Proceedings of CHI 2011 (pp. 33–42).
New York, NY: ACM.
Licoppe, C., & Morel, J. (2012). Video-in-interaction: “Talking heads” and the multimodal organization of mobile and Skype video calls. Research on Language and
Social Interaction, 45(4), 399–429.
Mantei, M. M., Baecker, R. M., Sellen, A. J., Buxton, W. A. S., Milligan, T., & Wellman,
B. (1991). Experiences in the use of a media space. In Proceedings of CHI 1991 (pp.
203–208). New York, NY: ACM.
Mutlu, B., Yamaoka, F., Kanda, T., Ishiguro H., & Hagita, N. (2009). Nonverbal
leakage in robots: Communication of intentions through seemingly unintentional
behavior. In HRI’09: Proceedings of the 4th international conference on human robot
interaction (pp. 69–76). New York, NY: ACM.
Neustaedter, C., Venolia, G., Procyk, J., & Hawkins, D. (2016). To beam or not to
beam: A study of remote telepresence attendance at an academic conference. In
Proceedings of ACM conference on computer supported cooperative work. New York,
NY: ACM.
Nourbakhsh, I. R. (2013). Robot futures. Cambridge, MA: MIT Press.
O’Conaill, B., Whittaker, S., & Wilbur, S. (1993). Conversations over video conferences: An evaluation of the spoken aspects of video-mediated communication.
Human-Computer Interaction, 8, 389–428.
Paulos, E., & Canny, J. (1998). PRoP: Personal roving presence. In CHI ’98 Proceedings of the conference on human factors in computing systems (pp. 296–303). ACM
Press/Addison-Wesley Publishing Co. New York, NY, USA.
Rae, I., Takayama, L., & Mutlu, B. (2013). The influence of height in robot-mediated
communication. In Proceedings of the 8th ACM/IEEE international conference on
human–robot interaction (HRI ’13) (pp. 1–8). Piscataway, NJ: IEEE Press.
Rae, I., Venolia, G., Tang, J. C., & Molnar, D. (2015). A framework for understanding
and designing telepresence. In Proceedings of the 18th ACM conference on computer
supported cooperative work and social computing (CSCW ’15) (pp. 1552–1566). New
York, NY: ACM.
Sirkin, D., Venolia, G., Tang, J., Robertson, G., Kim, T., Inkpen, K. . . . Sinclair, M. (2011). Motion and attention in a kinetic videoconferencing proxy. In
Human-computer interaction – INTERACT 2011. Lecture notes in computer science (Vol. 6946) (pp. 162–180). Berlin, Germany: Springer.
Takayama, L., & Go, J. (2012). Mixing metaphors in mobile remote presence. In Proceedings of computer supported cooperative work (CSCW ’12) (pp. 495–504). New York,
NY: ACM.
Tsui, K. M., Desai, M., & Yanco, H. A. (2012). Towards measuring the quality of
interaction: Communication through telepresence robots. In Proceedings of the performance metrics for intelligent systems (pp. 101–108). New York, NY: ACM.
Yoshimi, B., & Pingali, G. (2002). A multimodal speaker detection and tracking system for teleconferencing. In Multimedia ’02: Proceedings of the tenth ACM international conference on multimedia (pp. 427–428). New York, NY: ACM.
Robot-Mediated Communication
15
SUSAN C. HERRING SHORT BIOGRAPHY
Susan C. Herring is Professor of Information Science and Linguistics and
Director of the Center for Computer-Mediated Communication at Indiana
University Bloomington. Trained in linguistics at the University of California at Berkeley, she was one of the first scholars to apply linguistic methods of analysis to computer-mediated communication (CMC). Her research
has focused on structural, pragmatic, interactional, and social phenomena
in digital communication, especially as regards gender issues. Her recent
interests include online multilingualism, multimodal CMC, and telepresence
robot-mediated communication.
Professor Herring is a past editor of the Journal of Computer-Mediated
Communication and currently edits the online journal Language@Internet.
Her publications include numerous scholarly articles on CMC and three
edited volumes: Computer-Mediated Communication: Linguistic, Social and
Cross-Cultural Perspectives (Benjamins, 1996), The Multilingual Internet:
Language, Culture, and Communication Online (Oxford University Press, 2007,
with B. Danet), and The Handbook of Pragmatics of Computer-Mediated Conversation (Mouton, 2013, with D. Stein and T. Virtanen). Professor Herring is
a past Fellow of the Center for Advanced study in the Behavioral Sciences
at Stanford University (CASBS) and has been a Visiting Researcher in the
Psychology Department at the University of California, Santa Cruz.
Webpage: http://info.ils.indiana.edu/∼herring/
CV: http://info.ils.indiana.edu/∼herring/cv.html
Center for Computer-Mediated Communication: https://ccmc.ils.indiana.
edu
RELATED ESSAYS
Empathy Gaps between Helpers and Help-Seekers: Implications for Cooperation (Psychology), Vanessa K. Bohns and Francis J. Flynn
Identity Fusion (Psychology), Michael D. Burhmester and William B. Swann
Jr.
Mental Models (Psychology), Ruth M. J. Byrne
Authenticity: Attribution, Value, and Meaning (Sociology), Glenn R. Carroll
Spatial Attention (Psychology), Kyle R. Cave
Misinformation and How to Correct It (Psychology), John Cook et al.
Cognitive Processes Involved in Stereotyping (Psychology), Susan T. Fiske and
Cydney H. Dupree
The Development of Social Trust (Psychology), Vikram K. Jaswal and Marissa
B. Drell
16
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
The Neurobiology and Physiology of Emotions: A Developmental Perspective (Psychology), Sarah S. Kahle and Paul D. Hastings
Reconciliation and Peace-Making: Insights from Studies on Nonhuman Animals (Anthropology), Sonja E. Koski
The Psychological Impacts of Cyberlife Engagement (Psychology), Virginia S.
Y. Kwan and Jessica E. Bodford
Neural and Cognitive Plasticity (Psychology), Eduardo Mercado III
Gestural Communication in Nonhuman Species (Anthropology), Simone Pika
Class, Cognition, and Face-to-Face Interaction (Sociology), Lauren A. Rivera
Understanding Biological Motion (Psychology), Jeroen J. A. Van Boxtel and
Hongjing Lu
Speech Perception (Psychology), Athena Vouloumanos
-
Robot-Mediated Communication
SUSAN C. HERRING
Abstract
Since telepresence robots began entering the US commercial market over a decade
ago, telepresence robot-mediated communication (RMC) has become increasingly
prevalent and relevant. In this essay, I describe key technological properties of telepresence robots, summarize findings regarding communication and social interaction
through such robots, and propose a framework to guide future study of telepresence
robot-mediated discourse and language use. In concluding, I reimagine how telepresence robots could be reconceptualized and redesigned, for example, by moving
beyond human metaphors to incorporate “superhuman” attributes, and raise questions about the intended and unintended consequences of RMC.
WHAT IS ROBOT-MEDIATED COMMUNICATION AND WHY DOES IT
MATTER?
As robots become increasingly common human helpers and companions, the
study of human–robot interaction has surged in fields such as ergonomics,
healthcare, education, and human–computer interaction. This includes
interest in how people communicate with and through robots that are
teleoperated by humans, or what in this essay is referred to as robot-mediated
communication (RMC).
RMC is human–human communication in which at least one party is telepresent through voice, video, and motion in physical space via a remotely
controlled robot (Herring, 2015).1 Sometimes described as “videoconferencing on wheels” (Desai, Tsui, Yanco, Uhlik, 2011), RMC adds to real-time audio
and video the ability of a person to navigate and move about in a remote
physical location embodied as, or through the proxy of, a robot.2 Because of
the embodiment and enhanced control that they offer, particularly in terms of
1. Some categories of remotely operated robots, such as teleoperated service robots, robotic toys, and
androids, typically do not include video. These are not considered to be RMC platforms in this essay.
2. RMC is sometimes referred to as embodied video-mediated communication (eVMC; Tsui, Desai, & Yanco,
2012). Alternate names for telepresence robots that can be found in the literature include personal roving
presence (ProP; Paulos & Canny, 1998), mobile remote presence (MRP; e.g., Takayama & Go, 2012), and
mobile robotic telepresence (MRP; Kristoffersson, Coradeschi, & Loutfi, 2013).
Emerging Trends in the Social and Behavioral Sciences.
Robert Scott and Marlis Buchmann (General Editors) with Stephen Kosslyn (Consulting Editor).
© 2016 John Wiley & Sons, Inc. ISBN 978-1-118-90077-2.
1
2
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
mobility, telepresence robots can provide a richer sense of “being there” than
online videoconferencing technologies such as Skype. They enable a user not
only to communicate at a distance but to be virtually “in two places at once.”
The term RMC was coined by analogy with “computer-mediated communication” (CMC), which refers to human–human communication mediated by
networked computers—especially the Internet—and other digital media.
In that RMC mediates human–human communication and supports social
as well as task-related interaction, it resembles textual modes of CMC such
as email, text messaging, and (micro)blogging; graphical avatar-mediated
communication in virtual worlds; and online audio and video chat. Unlike
most CMC applications, however, RMC is asymmetrical, in that one person
is telepresent via a robot (henceforth, the pilot) while others are physically
present (henceforth, the local interlocutors).3
Not much research on RMC has been carried out by communication scholars to date.4 One reason is that although telepresence robots have existed
since the late 1990s (Paulos & Canny, 1998), high-definition video transmission and remote navigation use a great deal of wireless bandwidth,5 and it
has only become feasible to deploy such robots in real-world contexts since
fiber optic technologies expanded Internet bandwidth in the mid-2000s. The
first commercial telepresence robots were mobile robotic platforms designed
for use by physicians in medical settings. In the past few years, the number
of commercially available telepresence robots has grown,6 and research and
development are accelerating apace.
A consequence of this growth is that RMC is becoming increasingly
prevalent and socially relevant. More people are using telepresence robots
and producing RMC in an expanding range of contexts: business, educational, medical, and social. Telepresence robots are also used in security
and high-risk operations such as surveillance, mining, and search and
rescue, where it would be tedious or unsafe to send humans in; however, as
communication is secondary in such uses (if it is relevant at all), they are not
considered further here.
I research and use RMC in my professional academic life. The discussion
that follows reflects my experiences piloting a variety of telepresence robots
3. It is possible for all parties to be telepresent through multiple robots, but unless the robots need to
act in or on the physical space, it requires fewer resources and less effort for multiple remote interlocutors
to interact in virtual space.
4. An exception is the work of Leila Takayama (Lee & Takayama, 2011; Rae, Takayama, & Mutlu, 2013;
Takayama & Go, 2012), who uses the term RMC in several of her publications.
5. Bandwidth refers to the data throughput capacity of any communication channel
(http://www.encyclopedia.com/topic/Bandwidth.aspx, retrieved December 11, 2015).
6. Some of the more affordable ($2000–$3000) telepresence robots produced in the United States are
the Double, the TeleMe, and the Beam+. More expensive models (ranging from $7000 to $70,000) include
the VGo, the BeamPro, and the iRobot Ava. Recently, cheaper models produced overseas have entered the
market, including the Chinese PadBot (listed at $950) and the Russian Synergy Swan (listed at $999). Prices
are as of February 2016.
Robot-Mediated Communication
3
(in addition to several that I own) as well as the literature on telepresence
robots and RMC. After briefly describing key technological properties
of telepresence robots, I summarize what research has found regarding
communication and social interaction through such robots, or what I
call RMC broadly construed. Data-driven analysis of the actual, situated,
and embodied communicative practices of interlocutors in telepresence
robot-mediated conversations, or RMC narrowly construed, is largely
lacking so far. Thus, I propose a framework with questions and methods to
guide future study of telepresence robot-mediated discourse and language
use. In the final section, I consider ways in which telepresence robots could
be reconceptualized and redesigned, and raise questions about the intended
and unintended consequences of RMC.
TECHNOLOGICAL PROPERTIES OF TELEPRESENCE ROBOTS
When people think of robots, they tend to think first of autonomous robots
such as R2-D2 and C-3PO in the Star Wars movies. Autonomous robots
depend on preprogrammed commands and artificial intelligence, and they
are limited in their ability to communicate compared to human beings. In
contrast, telepresence robotics is a form of robotic remote control by a human
operator that is used to facilitate geographically distributed communication.
Telepresence robot-mediated interaction is intended to simulate face-to-face
(f2f) communication, and its success (or failure) is typically evaluated in
comparison to f2f interaction. That said, the line between telepresence and
autonomous robots often blurs, as when autonomous features, such as
obstacle avoidance, are incorporated into human-piloted robots.
There are “child-sized” telepresence robots (such as the Telenoid, developed in Japan, which is intended to be held in the local user’s arms) and
smaller table-top devices (such as the Kubi and the MeBot). The focus of
this essay is on “adult-sized” telepresence robots, which are the most widely
deployed and the most studied to date. The following descriptions pertain
especially to the adult-sized telepresence robots that are currently commercially available in the United States (referred to for convenience simply as
“telepresence robots” or “robots” henceforth), as exemplified by the VGo,
the QB, the BeamPro, the Beam+, the Double, and the iRobot Ava (Figure 1).
These devices are shaped and constrained by a specific set of technological
properties:
Embodiment. A telepresence robot can be designed to look like a human
being, but most versions in use today are not. The “head” of the typical
telepresence robot is (or includes) a video monitor; some robots have
4
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
iRobot Ava
Double
Beam+
QB
VGo
BeamPro
Figure 1 Some commercial telepresence robots.
an iPad or Android tablet as their video monitor. The head and shoulders of the pilot are typically visible in the video screen. The robot’s
“body,” in contrast, is often little more than a vertical column mounted
on a wheeled base, as shown in Figure 1. Robotic arms, because they are
difficult to create and expensive to produce, usually are not included,
although some designs include pointing devices.7
Size. Especially if the intended use is in a work environment, the general
sense among designers is that the robot should be large enough to be
taken seriously, but at the same time, not so large as to be perceived as
intimidating or dangerous. That said, current commercial models range
widely from 11 to 186 pounds, with heights from 2.8 to 6 feet, corresponding roughly to the height of a seated or a (short) standing adult
human. Some robots allow the pilot to adjust the robot’s height while
in use.
Movement. The main movement of telepresence robots is rolling about
in physical space. Similar to audio- and video-conferencing, most
telepresence robots operate through a WiFi (wireless) network. The
pilot remotely controls the movement of the robot through a computer
interface that features various navigation controls and indicators; some
robots can also be controlled via touch screen or a joystick. Today’s
robots typically have speeds equivalent to a (slow) walking pace.
Some can automatically detect obstacles and edges (such as stairs) and
prevent the robot from rolling into them. Some, such as the iRobot
Ava, are equipped with automated point-to-point navigation. These
automated features let the pilot focus less on navigation and more on
communication.
7. The early PRoP robot, for example, included a two-degrees-of-freedom pointer “so that remote
users [could] point as well as make simple motion[s]” (Paulos & Canny, 1998).
Robot-Mediated Communication
5
Audio and Video. The pilot “sees” through the robot’s cameras and “hears”
through its microphones, like in video conferencing. According to
Neustaedter, Venolia, Procyk, and Hawkins (2016), the head camera on
the BeamPro, a high-end telepresence robot, provides the equivalent of
20/200 vision. Peripheral vision is also typically limited, and in robots
that use one head camera, depth perception is lacking. To partially
compensate for these limitations, some head cameras include a zoom
feature, and some pan and tilt. Some robots are also equipped with a
camera that provides views down to the base to aid in navigation. As
in videoconferencing, the pilot sees a small picture-in-picture image of
him- or herself in the control interface; however, auditory feedback is
often lacking.
Message Transmission. Telepresence robots support synchronous,
ephemeral, two-way, voice-based communication, similar to audio–
video conferencing and f2f communication. Some also let the pilot
leave text on the robot’s video screen, and my VGo converts text typed
by the pilot into speech by the robot, which can be useful as a backup
when audio transmission problems occur.
These properties have consequences for RMC, both broadly and narrowly
construed.
COMMUNICATION AND SOCIAL INTERACTION THROUGH
TELEPRESENCE ROBOTS
The primary aim of telepresence robots is to foster social interaction between
individuals, or RMC broadly construed. That aim is often thwarted in practice, however, by network problems that result in unsynchronized audio and
video streams or loss of network connectivity. The robot may bump into
things or stall in the middle of a hallway, and audio or video may break up or
be temporarily lost. Audio is more important than video in conveying a sense
of presence; it is also essential for verbal interaction. I have found through
experience that poor audio input quality in combination with limited vision
can make locating and identifying the source of voices in the local environment challenging. Laggy audio can also compromise fundamental aspects
of turn-taking and interruptions (O’Conaill, Whittaker, & Wilbur, 1993). As
Desai et al. (2011) incisively conclude, “audio issues [can] make it difficult to
have any conversation, let alone a natural conversation.”
One must look beyond the present technical limitations of telepresence
robots, however, to appreciate their communicative potential. When the
technology works like it is supposed to, RMC has been found to be more
casual and sociable than video conferencing. Telepresence robots that were
6
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
used in technology workplaces for a year or more were found to enhance
“impromptu work meetings” (especially to ask questions, exchange ideas,
and get answers), “being available,” “planned social meetings,” “planned
work meetings,” “seeking people,” and “greeting/socializing” (Lee &
Takayama, 2011). Tsui et al. (2012) found that the novelty effect of using a
telepresence robot wears off quickly, within 15 minutes. Sometimes, the
robot becomes effectively “invisible-in-use” (Takayama & Go, 2012), such
that the remote user and the local interlocutor(s) experience the subjective
illusion of talking f2f.8 Some pilots identify with the robots as themselves,
to the point that they feel that their personal space is violated when a
local user approaches too close or touches their robot. These findings lend
support to Lee and Takayama (2011)’s claim that RMC blurs “boundaries …
between person and machine, physical and virtual, and being here vs. being
elsewhere.”
At the same time, RMC can be socially awkward, and new norms of interaction must be negotiated as pilots and local interlocutors mutually adjust to
the technological properties of telepresence robots. For example, local interlocutors are often unsure how to deal with a stalled robot, and may assume
that the interaction has ended and walk away, rather than waiting a few
moments for the pilot to reestablish a network connection or moving the
robot into range of a WiFi hot spot. The robot may impede normal human
traffic flow in a building or block others’ view in meetings or at conferences
without the pilot being aware of it, owing to the robot’s limited range of
vision. The pilot may misgauge social distance due to a lack of depth perception and position the robot too close or too far away from an interlocutor;
may talk too loudly, owing to a lack of audio feedback; or may linger too long
after a conversation, owing to missed social cues (Lee & Takayama, 2011).
Unless they understand the robot’s technological limitations, local interlocutors may interpret these behaviors as socially inappropriate or rude on the
part of the pilot.
Locals may also ascribe social meaning to the robot’s size. Robot height
influenced local interlocutors’ perceptions of leadership effectiveness in a
study by Rae, Takayama, and Mutlu (2013), with robots that were taller
than locals sitting down perceived as more leader-like than robots that were
shorter than the seated locals.9 Kristofferson et al. (2013) found that “people
of different [height] preferred robots of different height and adjusted their
distance to them accordingly.” This may have stemmed from a desire to
8. Paradoxically, realistically humanoid (e.g., android-style) robots can distract and detract from the
interaction experience (Mutlu, Yamaoka, Kanda, Ishiguro, Hagita, 2009), possibly because they only
project the pilot’s voice and movements, and not his or her face. Video is useful in “provid[ing] subtle
information about the motions, actions, and changes at the remote location” (Paulos & Canny, 1998).
9. Girth also matters, it seems. Leila Takayama (personal communication) reports that the thinner
robots have less presence than the wider, more substantial ones.
Robot-Mediated Communication
7
look the pilot in the eye as much as possible, or to adjust for the perceived
or desired power distance between the pilot and the local interlocutors.
The embodied nature of the robot is also relevant to issues of identifiability
and anonymity. More than one person can pilot a robot (albeit not at the same
time), and one person can pilot multiple robots. When more than one person
uses the same robot or the same kind of robot, the anonymous appearance
of the robot can make the pilot difficult to identify, especially from behind.
Locals sometimes dress or decorate the robot, for example, with a hat, t-shirt,
or scarf, to associate it with particular pilots (Neustaedter et al., 2016). The
robot’s anonymous appearance may be advantageous, however, in circumstances where the remote participants wish to avoid drawing attention to
themselves.
Ambiguity may also arise about a moving robot’s intent, owing to gaze misalignment and a lack of gestural cues—does the pilot want to chat, or is he
or she just trying to pass by? (Neustaedter et al., 2016). As in video conferencing, the pilots’ cameras are often facing in a different direction than their
video image appears to be looking (Lee & Takayama, 2011), and thus the subtle cues that are normally exchanged via gaze f2f are not available in RMC.
The pilot’s gestures are also less visible. Some researchers have suggested
that because facial expressions and nonverbal gestures are not as salient,
telepresence-mediated interaction feels less “real” than f2f communication
(Mantei et al., 1991). My own experience piloting telepresence robots is that
I am “present” at the remote location but not as present as if I were in my
physical body. This too can have advantages: I have observed that locals’
behavior tends to be more unguarded around my robot than it would be if
I were physically present, and it is easier to observe others in social interactions when less focus is on me, as tends to occur once the novelty of the robot
avatar wears off. Indeed, some pilots move the robot from side to side just to
remind locals that they are there.10
Although lacking in the ability to produce human-like social cues, telepresence robots have other ways of signaling intention, such as flashing lights or
gesturing with a laser pointer, and these can develop conventionalized meanings. The robot’s mobility can be a form of body language for starting and
stopping conversations; for example, slight movements may indicate the end
of a conversation (Neustaedter et al., 2016). Simply turning the robot’s head
or body to face the intended addressee is often an effective way to engage.
In multiparty interactions, one study found that turning to look at a current
speaker resulted in more and longer conversational turns. At the same time,
“swiveling toward one [local] participant often meant that another [local]
participant was left looking at the edge of the display screen” (Sirkin et al.,
10. Leila Takayama, personal communication.
8
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
2011), and the time required to rotate the display introduced delay into the
conversation, disturbing its natural flow.
Related to movement, the robot’s lack of arms means that it requires
help to manipulate its surroundings (e.g., opening doors, pressing elevator
buttons, moving objects), and this must be negotiated between pilot and
locals. Because of this, some pilots report feeling like they are disabled
(Lee & Takayama, 2011).11 Locals may share this perception too. Takayama
and Go (2012) found that people have different metaphors for telepresence
robots, and their social expectations depend on those metaphors. Locals who
view the robot as a machine, purely a mediating technology, tend to have
lower social expectations of it; they are more likely to help the robot, while
feeling less constrained by f2f norms of politeness. For instance, they might
not consider it rude to put their feet up on the robot’s base while conversing
with it, or to mute the telepresence robot from the local side (Takayama
& Go, 2012). In contrast, people who think of the robot as a person and a
social actor tend to consider such behaviors impolite. Many subjects who
thought of the robot as a person in Takayama and Go’s study thought of it as
a disabled person. The implications of the disability metaphor for politeness
and helpful behavior have not been studied yet, however.
LANGUAGE AND DISCOURSE IN ROBOT-MEDIATED
COMMUNICATION
“The most important component of communicating through a telepresence
robot is the conversation itself” (Tsui et al., 2012), or RMC narrowly construed. Yet although language and discourse in CMC has been described
extensively,12 almost no study has been made of the linguistic choices that
interlocutors make in RMC—their patterns, their variations, their intended
meanings, or their pragmatic effects. Moreover, no research has been based
on close analysis of a corpus of actual RMC. Is language use more or less formal in RMC than in f2f? How do others refer to the robot—as “you,” “s/he,”
or “it”—and what factors condition variation in reference? How does the
limited mobility and range of visibility of pilots affect their ability to attract
attention, gain and hold the conversational floor, and time turn-taking appropriately? What is the social and hierarchical status of the pilots: Are they
taken less seriously when they are in positions of authority? Do they receive
politeness and deference the same as if they were physically present, and to
what extent does this vary by gender and culture—theirs and that of their
local interlocutors?
11. In contrast, some physically disabled users, who otherwise might not be able to move about a
remote site, experience robotic embodiment as empowering (Neustaedter et al., 2016).
12. For a recent overview, see Herring and Androutsopoulos (2015).
Robot-Mediated Communication
9
As a framework that could be used to guide exploration of these and related
questions in the pilot’s and the local interlocutors’ discourse, I identify five
categories of language use in RMC that could fruitfully be researched, organized from smallest to largest linguistic units and from least to most context
dependent, with sample phenomena of potential interest listed for each category. Each category could be addressed by existing linguistic methods of
analysis, modified to take into account the mediating properties of telepresence robots.13 (Italics indicate phenomena that have been touched upon in
the RMC literature.)
Structure. RMC- and context-specific conventions of language use; word
frequencies; formality; organization of speaking turns, exchanges, and
conversations; disfluencies; intonation and volume; gesture.
Meaning: Word Choice/Use. Discourse topics (What is the talk about?); interactive personal pronouns (e.g., “I”, “we”, “you”) and forms of reference
(“s/he”, “it”, “the robot”, etc.); vocabulary diversity and size; metaphor
use.
Meaning: Pragmatics. Speech acts (What are the speakers doing through
language?); determining intention; observations and violations of conversational maxims; politeness; topic initiation, development, and termination; deixis; presupposition, implicature, and so on.
Interaction Management. Attention-getting; greeting; leave-taking (termination of interaction); preferred and dispreferred responses; turn-taking;
back-channeling; pausing/silence/inactivity [verbal vs multimodal
(cf. Licoppe & Morel, 2012)]; conversational repair; gaze; orientation to
current speaker.
Social Phenomena. Stylistic differences according to gender, age, socioeconomic status, culture, role, experience with robots, and so on;
self-presentation and self-revelation; lying and deception; playful
behavior; giving and receiving support; accommodation; conflict and
conflict management; negotiation (e.g., around use of shared space);
power/leadership; influence; deference, and so on.
These categories are not discrete; a single phenomenon could be addressed
on more than one linguistic level. Rather, the categories are intended as different lenses through which RMC can be viewed. Each lens brings into view
different questions, methods, and theoretical perspectives.
Naturally occurring robot-mediated interactions constitute the most
authentic data for studying language use in RMC. There are privacy issues
13. The organization of these categories follows that for computer-mediated discourse analysis, a
paradigm developed for textual CMC (Herring, 2004).
10
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
associated with collecting such data, though, as it could be perceived as
mobile surveillance. Moreover, unlike asynchronous web communication,
RMC is not self-archiving; the researcher needs to devise methods of recording, transcription, and presentation for information not normally found in
CMC, such as movement and gaze direction. Nonetheless, close analysis of
language and discourse in RMC is an important and fruitful direction to
pursue in future research.
Experimental methods are also valuable—for example, for comparing
RMC, both narrowly and broadly construed, with other modes of communication. Such comparisons would spotlight different effects of robot
mediation: RMC compared with f2f communication would shed light
on the effects of the robot proxy; RMC versus video-mediated communication would illuminate the effects of ambulation; and RMC versus
avatar-mediated communication would highlight the differential effects of
physical and virtual environments, for instance.
Finally, surveys and interviews are useful for querying participants
directly about RMC. In addition to their linguistic and social perceptions,
local participants could be asked to what extent they felt that the pilot was
present in a given interaction, toward the larger goal of understanding what
circumstances contribute to creating the effect of “invisible-in-use” robotic
telepresence.
THE FUTURE OF TELEPRESENCE ROBOTICS AND RMC
Referring to autonomous robots, Nourbakhsh (2013, p. xv) recently wrote,
“[T]he ambitions of robotics are no longer limited to imitating [human
beings]. … We have invented a new species, part material and part digital,
that will eventually have superhuman qualities.” Similarly, telepresence
robots need not be limited by “human” metaphors. Present iterations
already have “superhuman” abilities, compared with what is possible in
f2f communication: They enable a person to be in two (or more) places
simultaneously, and they provide mobility across great distances to the
mobility impaired. The first telepresence robot, Eric Paulos’s ProP, could
also float through the air.
In theory, nearly any autonomous robot in use or development today could
become a telepresence device with the addition of two-way audio–video
communication. Communicating remotely with other people through
“giant, military robo-dogs”14 (Nourbakhsh, 2013) is neither necessary nor
desirable, but the human-pilotable flying robots known as drones could
make useful communication devices, in addition to being able to navigate
14. A reference to Boston Dynamics’ “Big Dog” military robot. See: http://www.bostondynamics.
com/robot_bigdog.html.
Robot-Mediated Communication
11
outdoors over uneven terrain. Other nonhuman robotic designs suggest
interesting possibilities for remote human interactions, as well, ranging from
telepresence robots in the form of normal-sized dogs (to keep company with
and comfort the ill and elderly) to robots with multiple, highly specialized
arms (for remote surgical procedures).
To enhance robot-enabled multimodal, multicontinental telepresence,
future robots could include built-in navigation and map-creation technology; automated speech translation across languages; augmented reality
technology that overlays the video with information about current or
anticipated interlocutors drawn from an Internet database; and sensors to
collect information about the remote environment, ranging from proxemic
information about when a person is trying to squeeze by to information
about interlocutors’ emotional states. The robots could change appearance
according to who is piloting them at the moment. For example, they could
include screens upon which holographic images are projected, so that a
moving, speaking, three-dimensional representation of the pilot’s physical
self is visible in the remote environment. Making the remote pilot’s identity
readily visible is one way to encourage more human–human interactions,
and making the remote pilot visible from all angles would make bystanders
more likely to enter into conversations (Takayama & Go, 2012). Pilots,
at their end, could wear virtual reality gear to simulate an experience of
immersion in the remote environment, and their body motions could be
tracked and mirrored in the remote robot. The robots themselves could be
flexible, pliable, and gentle to the touch.
Meanwhile, the telepresence literature is filled with recommendations
for ways to improve the current paradigm of “videoconferencing on
wheels.” More and better cameras would provide the pilots with better
situation awareness (Desai et al., 2011). Convex video displays could afford
a wider range of directing a pilot’s gaze while not “turning her back” on
some participants (Sirkin et al., 2011). Some current video conferencing
systems use audio location to work out who is speaking and then focus
cameras on that speaker (Yoshimi & Pingali, 2002); this could also be
done for robots. A screen with a camera embedded in the middle would
aid interlocutors in establishing eye contact (Kristoffersson et al., 2013).
Features to provide remote pilots with more feedback about how they
are presenting themselves—for example, providing mechanisms to help
monitor their volume levels, monitor their appearance, and communicate
nonverbally—could improve the user experience for both remote pilots and
locals (Lee & Takayama, 2011).
The robot’s base could have treads that would allow it to roll over curbs
and climb stairs (Paulos & Canny, 1998). Lasers could assist navigation when
passing through doorways and while driving down hallways; for example,
12
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
if the robot drives at an angle toward a wall, the robot could autonomously
correct its direction (Desai et al., 2011). Autonomous navigation is desirable in
general for safety reasons, for ease of use, and to reduce social awkwardness
associated with bumping into walls and other objects. In studies by Desai
et al. (2011), a “follow person” behavior and a “go to destination” mode were
rated as potentially quite useful. However, automation raises issues of ethics
and legal liability. As Takayama and Go (2012) ask, “If a semi-autonomously
navigating MRP (mobile remote presence) system bumps into a person or
damages valuable furniture, who is to blame?” Adjustable autonomy would
allow the pilot to select from a range of autonomous behaviors or levels
according to circumstances.
At present, the main bottlenecks to the widespread adoption of telepresence robots are Internet/WiFi reliability and the cost of acquiring units. Costs
are already dropping as new models appear on the market.15 As for lost WiFi
connection due to limitations in range of WiFi and “network shadow” caused
by metal objects such as elevators and lockers, Kristoffersson et al. (2013)
propose automatically “reversing the [robot’s] motion in slow speed until
sufficient access to the WiFi is recovered.” They also suggest adding a light
or backup beep “to indicate the robot’s intention.”
Some suggestions from the research literature have already been implemented in robotic prototypes. Articulating arms, for instance, have been
implemented on the MeBot V4 tabletop telepresence robot. The robot has
two arms with three degrees of freedom: shoulder rotation, shoulder extension, and elbow extension; the arm movements are directly controlled by the
pilot, who adjusts the joints on a passive model of the robot (Kristoffersson
et al., 2013). The researchers who designed the MeBot V4 found that local
users rated it as more engaging and likable than a similar static robot design.
The success of this prototype raises the possibility that a similar approach
could be adapted to adult-sized robots, although body tracking would be
more direct. However they are implemented, remotely controllable arms
would greatly increase the ability of telepresence robots to interact with
and in remote environments, rendering them both more sociable (e.g., able
to gesture, shake hands, and hug) and less “disabled” and dependent on
assistance from local interlocutors (e.g., to press elevator buttons and open
doors).
As Nourbakhsh rightly observes, robot proxies expand our physical space
and reach. At present, the implications of that expansion have only begun
to be felt, implications that extend beyond the fields of technology design,
human–robot interaction, and CMC into the social and behavioral sciences,
and from there into any number of applied domains. Rae, Venolia, Tang,
15. See note 6.
Robot-Mediated Communication
13
and Molnar (2015) caution that designers and researchers should keep in
mind what future they are trying to invent with telepresence. Because the
focus of this essay is on communication, I have not considered other ways in
which telepresence extends human experience that do not primarily involve
human–human communication, including actions that would be impossible in one’s physical body such as extreme mountain climbing, or perceiving/feeling through the eyes/body of another person wearing a telerobotic
skin. Such applications of telerobotics raise fascinating questions in their own
right.
As regards RMC, researchers need to consider the nature of the communication that telepresence robots are used to support, between what kinds
of communicators, for what purposes, and in what contexts? Beyond these
primary, or intended uses, what secondary or unintended consequences
might follow from RMC? The popular media are filled with hype and
warnings about our future coexistence with robots. Telepresence robots are
human proxies, not autonomous machines; nonetheless, their impact if they
come into widespread use could be as great as that of autonomous robots.
This is all the more true as the line between autonomous and teleoperated
robots continues to blur.
ACKNOWLEDGMENTS
Many thanks to Jeannie Fox Tree, Rob Martin, Leila Takayama, and Steve
Whittaker for their valuable input on this essay.
REFERENCES
Desai, M., Tsui, K. M., Yanco, H. A., & Uhlik, C. (2011). Essential features of telepresence robots. In Proceedings of the IEEE international conference on technologies for
practical robot applications (TePRA ’11), (pp. 15–20). Los Alamitos, CA: IEEE.
Herring, S. C. (2004). Computer-mediated discourse analysis: An approach to
researching online behavior. In S. A. Barab, R. Kling & J. H. Gray (Eds.), Designing for virtual communities in the service of learning (pp. 338–376). New York, NY:
Cambridge University Press.
Herring, S. C. (2015). New frontiers in interactive multimodal communication. In A.
Georgapoulou & T. Spilloti (Eds.), The Routledge handbook of language and digital
communication (pp. 398–402). London, England: Routledge.
Herring, S. C., & Androutsopoulos, J. (2015). Computer-mediated discourse 2.0. In
D. Tannen, H. E. Hamilton & D. Schiffrin (Eds.), The handbook of discourse analysis
(Vol. ,2nd ed., pp. 127–151). Chichester, England: John Wiley & Sons.
Kristoffersson, A., Coradeschi, S., & Loutfi, A. (2013). A review of mobile robotic
telepresence. Advances in Human-Computer Interaction, 2013, article 3.
14
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
Lee, M. K., & Takayama, L. (2011). “now, i have a body”: Uses and social norms for
mobile remote presence in the workplace. In Proceedings of CHI 2011 (pp. 33–42).
New York, NY: ACM.
Licoppe, C., & Morel, J. (2012). Video-in-interaction: “Talking heads” and the multimodal organization of mobile and Skype video calls. Research on Language and
Social Interaction, 45(4), 399–429.
Mantei, M. M., Baecker, R. M., Sellen, A. J., Buxton, W. A. S., Milligan, T., & Wellman,
B. (1991). Experiences in the use of a media space. In Proceedings of CHI 1991 (pp.
203–208). New York, NY: ACM.
Mutlu, B., Yamaoka, F., Kanda, T., Ishiguro H., & Hagita, N. (2009). Nonverbal
leakage in robots: Communication of intentions through seemingly unintentional
behavior. In HRI’09: Proceedings of the 4th international conference on human robot
interaction (pp. 69–76). New York, NY: ACM.
Neustaedter, C., Venolia, G., Procyk, J., & Hawkins, D. (2016). To beam or not to
beam: A study of remote telepresence attendance at an academic conference. In
Proceedings of ACM conference on computer supported cooperative work. New York,
NY: ACM.
Nourbakhsh, I. R. (2013). Robot futures. Cambridge, MA: MIT Press.
O’Conaill, B., Whittaker, S., & Wilbur, S. (1993). Conversations over video conferences: An evaluation of the spoken aspects of video-mediated communication.
Human-Computer Interaction, 8, 389–428.
Paulos, E., & Canny, J. (1998). PRoP: Personal roving presence. In CHI ’98 Proceedings of the conference on human factors in computing systems (pp. 296–303). ACM
Press/Addison-Wesley Publishing Co. New York, NY, USA.
Rae, I., Takayama, L., & Mutlu, B. (2013). The influence of height in robot-mediated
communication. In Proceedings of the 8th ACM/IEEE international conference on
human–robot interaction (HRI ’13) (pp. 1–8). Piscataway, NJ: IEEE Press.
Rae, I., Venolia, G., Tang, J. C., & Molnar, D. (2015). A framework for understanding
and designing telepresence. In Proceedings of the 18th ACM conference on computer
supported cooperative work and social computing (CSCW ’15) (pp. 1552–1566). New
York, NY: ACM.
Sirkin, D., Venolia, G., Tang, J., Robertson, G., Kim, T., Inkpen, K. . . . Sinclair, M. (2011). Motion and attention in a kinetic videoconferencing proxy. In
Human-computer interaction – INTERACT 2011. Lecture notes in computer science (Vol. 6946) (pp. 162–180). Berlin, Germany: Springer.
Takayama, L., & Go, J. (2012). Mixing metaphors in mobile remote presence. In Proceedings of computer supported cooperative work (CSCW ’12) (pp. 495–504). New York,
NY: ACM.
Tsui, K. M., Desai, M., & Yanco, H. A. (2012). Towards measuring the quality of
interaction: Communication through telepresence robots. In Proceedings of the performance metrics for intelligent systems (pp. 101–108). New York, NY: ACM.
Yoshimi, B., & Pingali, G. (2002). A multimodal speaker detection and tracking system for teleconferencing. In Multimedia ’02: Proceedings of the tenth ACM international conference on multimedia (pp. 427–428). New York, NY: ACM.
Robot-Mediated Communication
15
SUSAN C. HERRING SHORT BIOGRAPHY
Susan C. Herring is Professor of Information Science and Linguistics and
Director of the Center for Computer-Mediated Communication at Indiana
University Bloomington. Trained in linguistics at the University of California at Berkeley, she was one of the first scholars to apply linguistic methods of analysis to computer-mediated communication (CMC). Her research
has focused on structural, pragmatic, interactional, and social phenomena
in digital communication, especially as regards gender issues. Her recent
interests include online multilingualism, multimodal CMC, and telepresence
robot-mediated communication.
Professor Herring is a past editor of the Journal of Computer-Mediated
Communication and currently edits the online journal Language@Internet.
Her publications include numerous scholarly articles on CMC and three
edited volumes: Computer-Mediated Communication: Linguistic, Social and
Cross-Cultural Perspectives (Benjamins, 1996), The Multilingual Internet:
Language, Culture, and Communication Online (Oxford University Press, 2007,
with B. Danet), and The Handbook of Pragmatics of Computer-Mediated Conversation (Mouton, 2013, with D. Stein and T. Virtanen). Professor Herring is
a past Fellow of the Center for Advanced study in the Behavioral Sciences
at Stanford University (CASBS) and has been a Visiting Researcher in the
Psychology Department at the University of California, Santa Cruz.
Webpage: http://info.ils.indiana.edu/∼herring/
CV: http://info.ils.indiana.edu/∼herring/cv.html
Center for Computer-Mediated Communication: https://ccmc.ils.indiana.
edu
RELATED ESSAYS
Empathy Gaps between Helpers and Help-Seekers: Implications for Cooperation (Psychology), Vanessa K. Bohns and Francis J. Flynn
Identity Fusion (Psychology), Michael D. Burhmester and William B. Swann
Jr.
Mental Models (Psychology), Ruth M. J. Byrne
Authenticity: Attribution, Value, and Meaning (Sociology), Glenn R. Carroll
Spatial Attention (Psychology), Kyle R. Cave
Misinformation and How to Correct It (Psychology), John Cook et al.
Cognitive Processes Involved in Stereotyping (Psychology), Susan T. Fiske and
Cydney H. Dupree
The Development of Social Trust (Psychology), Vikram K. Jaswal and Marissa
B. Drell
16
EMERGING TRENDS IN THE SOCIAL AND BEHAVIORAL SCIENCES
The Neurobiology and Physiology of Emotions: A Developmental Perspective (Psychology), Sarah S. Kahle and Paul D. Hastings
Reconciliation and Peace-Making: Insights from Studies on Nonhuman Animals (Anthropology), Sonja E. Koski
The Psychological Impacts of Cyberlife Engagement (Psychology), Virginia S.
Y. Kwan and Jessica E. Bodford
Neural and Cognitive Plasticity (Psychology), Eduardo Mercado III
Gestural Communication in Nonhuman Species (Anthropology), Simone Pika
Class, Cognition, and Face-to-Face Interaction (Sociology), Lauren A. Rivera
Understanding Biological Motion (Psychology), Jeroen J. A. Van Boxtel and
Hongjing Lu
Speech Perception (Psychology), Athena Vouloumanos